

دوسری دنیاؤں کی سطحوں کی کھوج ایک محتاط اور وقت طلب عمل ہے۔ مریخ پر، زمین اور روبوٹک ایکسپلوررز کے درمیان بات چیت میں چار سے 22 منٹ تک کا وقت لگ سکتا ہے۔
ڈیٹا کی منتقلی کی محدود صلاحیت اس بات کو بھی محدود کرتی ہے کہ کتنی معلومات آگے پیچھے بھیجی جا سکتی ہیں۔ ان چیلنجوں کی وجہ سے، سائنسدانوں کو روور کی سرگرمیوں کی پہلے سے منصوبہ بندی کرنی چاہیے۔
روورز توانائی کے تحفظ اور خطرات سے بچنے کے لیے بنائے گئے ہیں، اس لیے وہ کچے خطوں میں آہستہ آہستہ سفر کرتے ہیں۔ زیادہ تر معاملات میں، وہ روزانہ صرف چند سو میٹر کا فاصلہ طے کرتے ہیں، جو اس بات کو محدود کرتا ہے کہ آس پاس کے زمین کی تزئین کا کتنا مطالعہ کیا جا سکتا ہے اور ارضیاتی نمونوں کی وسیع رینج کو اکٹھا کرنا مشکل بنا دیتا ہے۔
ایک نیم خودمختار روبوٹ جو متعدد اہداف کو تلاش کر سکتا ہے۔ ان حدود پر قابو پانے کے لیے، محققین نے ایک مختلف حکمت عملی کا تجربہ کیا۔
انہوں نے ایک نیم خودمختار روبوٹک ایکسپلورر تیار کیا جو ایک ہدف سے دوسرے ہدف تک جانے اور مسلسل انسانی رہنمائی کے بغیر ڈیٹا اکٹھا کرنے کی صلاحیت رکھتا ہے۔ قریبی نگرانی میں کسی ایک چٹان پر توجہ مرکوز کرنے کے بجائے، روبوٹ کئی مقامات تک پہنچ سکتا ہے اور ہر ایک پر آزادانہ طور پر پیمائش کر سکتا ہے۔
نتائج سے معلوم ہوا کہ کمپیکٹ آلات سے لیس روبوٹ کارکردگی کو بہت بہتر بنا سکتے ہیں۔ یہ طریقہ سیاروں کی سطحوں پر وسائل کی توقع اور ‘بائیو سائنچر’ (یعنی زندگی کے ثبوت) کی تلاش دونوں کو تیز کرتا ہے۔
ترتیب میں متعدد اہداف کا تجزیہ کرکے، روبوٹ کم وقت میں زیادہ ڈیٹا اکٹھا کرسکتا ہے۔ ٹیم اس بات کا تعین کرنے کے لیے نکلی کہ آیا سائنسی آلات کا نسبتاً آسان سیٹ لے جانے والا روبوٹ تیزی سے کام کرتے ہوئے بھی بامعنی نتائج دے سکتا ہے۔
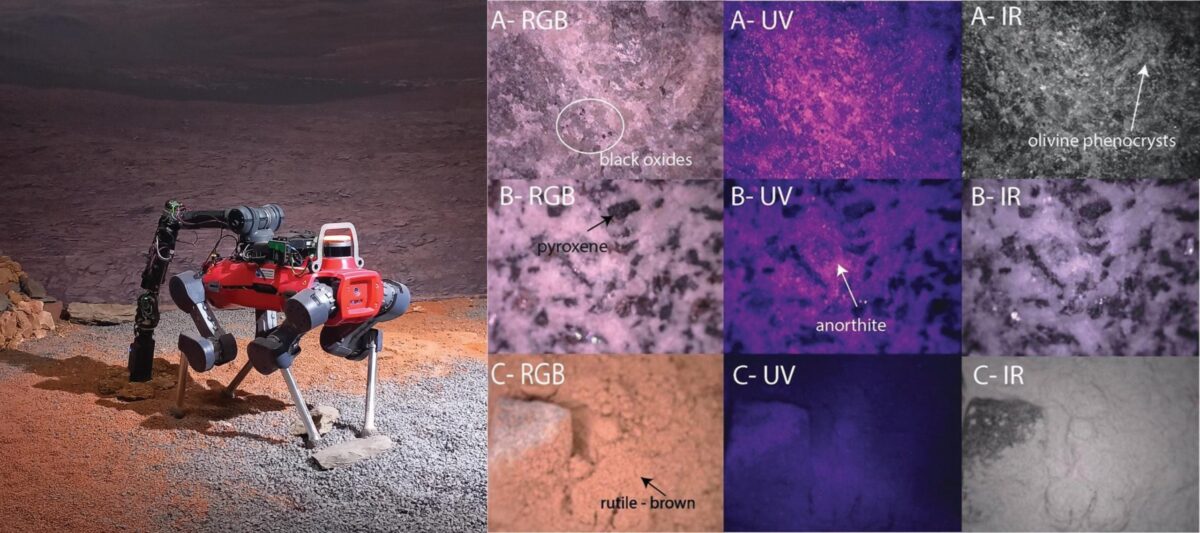
ان کے نتائج نے اس بات کی تصدیق کی کہ کمپیکٹ آلات بھی کلیدی سائنسی اہداف کو حاصل کرنے کے قابل ہیں، بشمول فلکیات اور وسائل کی تلاش کے لیے اہم چٹانوں کی نشاندہی کرنا۔ مریخ جیسے حالات میں کسی بھی روبوٹ کی جانچ کرنا اس نقطہ نظر کا جائزہ لینے کے لیے، محققین نے چار ٹانگوں والا روبوٹ ‘ANYmal’ استعمال کیا۔
یہ ایک روبوٹک بازو سے لیس تھا جس میں دو آلات تھے: خوردبین امیجر MICRO اور ESA-ESRIC اسپیس ریسورسز چیلنج کے لیے تیار کیا گیا پورٹیبل رامان سپیکٹرو میٹر۔ اس پروجیکٹ میں ای ٹی ایچ زیورخ، ای ٹی ایچ زیورخ میں روبوٹک سسٹمز لیب کے ساتھ تعاون شامل تھا۔
اسپیس، یونیورسٹی آف زیورخ، اور یونیورسٹی آف برن۔ تجربات باسل یونیورسٹی میں ‘مارسلابر’ سہولت پر کیے گئے۔ یہ ماحول ینالاگ چٹانوں، ‘ریگولتھ’ (یعنی سیاروں کی دھول) مواد، اور اینالاگ روشنی کے حالات کا استعمال کرتے ہوئے سیاروں کی سطح کے حالات کی تقلید کرتا ہے۔ جانچ کے دوران، روبوٹ خود مختار طور پر منتخب کردہ اہداف کی طرف بڑھا، اپنے آلات کو روبوٹک بازو کے ساتھ کھڑا کیا، اور تجزیہ کے لیے تصاویر اور سپیکٹرل ڈیٹا واپس بھیجا.





